Planning & Scheduling School
7th Planning & Scheduling School 2012 (P&S School 2012)
June 22-23
PLACEUniversity of São Paulo (USP) - São Paulo City, Brazil
Instituto de Matemática e Estatística da USP
Building and room: Bloco B - Auditório Jacy Monteiro
CALL FOR PARTICIPATION
In the last two decades the AI community has seen a great advance in planning and scheduling research. Planning systems have been shown to be drastically more efficient than earlier ones, and therefore constitute a promising foundation for large-scale industrial applications, as well as for achieving the AI goals. Much of this progress is not adequately covered in AI courses and textbooks, yet.
Therefore, the students at the planning and schedulling school of 2012 will have a great opportunity to have an in-depth look into the field with the following courses:
- I. Advanced Introduction to Planning: Models and Methods (Hector Geffner)
- II. Constraint-based Planning and Scheduling (Roman Barták)
- III. Probabilistic Planning (Mausam and Andrey Kolobov)
- IV. Recent Advances in Continuous Planning (Scott Sanner)
The courses programme will be available here.
The P&S School of 2012 will be an intensive two-days educational and mentoring program for graduate students and young researchers. We hope the school will also provide a lively forum for attendees to discuss their research lines. It will take place at University of São Paulo (USP), in the brazilian largest city - São Paulo - a few kilometers from the ICAPS conference site in Atibaia, Brazil.
The previous summer schools on automated planning (that took place in 2000, 2002, 2003, 2006, 2009 and 2011) have been a great success. In order to ensure the success of the school, the registration will be restricted to 50 participants.
REGISTRATION:
Single (only to participate in the School): US$ 160 (to attend the courses, download the material and two days lunch)
In order to make your registration to the P&S School, please, enter in the ICAPS 2012 registration system and choose the P&S School option. Note that if you don't want to register for the ICAPS conference, you can still make the registration only for the school.
HOTELS
There are two hotel options for the P&S School: L'Opera and Howard Johnson. They have special rates for events at USP (University of São Paulo).
L'Opera Hotel
Website: L'Opera Hotel
Prices:
- Single room: R$179,00
- Double room: R$ 179,00
- Triple room: R$ 219,00
- Quadruple room: R$ 267,00
(US 1,00 = R$ 2,00)
Location: Rua Pedroso de Morais, 323
Phone: +55-11-3035-1111
RESERVATION BY EMAIL: reservas@loperahotel.com.br
CONTACT PERSON: Daniela
Howard Johnson Hotel
Prices:
- Single room: R$ 225,00
- Double room: R$ 266,00
RESERVATIONS ONLY BY EMAIL: Sent a message for reservas3@astron.com.br
MESSAGE SUBJECT: Planning and Scheduling School at USP
MESSAGE BODY:
Hotel location: Rua Tavares Cabral, 61.
São Paulo, São Paulo, Brasil.
Event: Planning and Scheduling School at USP
Name(s):
Single or double room:
Check in/ Check out:
Rua Tavares Cabral N 61, Sao Paulo, 05423 BR
Check in: After 2:00 PM
Check out: Before 12:00 PM
 |
 |
 |
 |
REACHING SAO PAULO FROM GUARULHOS AIRPORT
By taxi
In Guarulhos Airport (GRU), there is taxi service (e.g., Guarucoop company - http://www.guarucoop.com.br/). The service desk (Guarucoop Kioski) is located outside the airport in front of the Arrivals Terminal exit. You can pre-pay for the service with credit card (AMEX, VISA and MASTERCARD) and the price is tabulated. The price to go to Sao Paulo by taxi is approximately R$ 130,00 (US 60,00)
By car
Not recommended if you have never drove a car in Sao Paulo. Guarulhos is next to Sao Paulo. However, Sao Paulo is one of the biggest city in the world, it has a caotic traffic like many other metropolis in the world. The directions signs are all in portuguese. If you REALLY wat to rent a car to reach Sao Paulo and USP for P&S School from GRU, the following tips will help you.
We encourage you to rent a car with GPS. When you leave the airport, enter in the Dutra Road to São Paulo direction. Remember that you are in Guarulhos, which is a city close to São Paulo. Then you must start following the sinalizations indicating São Paulo. Drive direct to MARGINAL TIETÊ avenue (13 Km). MARGINAL TIETE is a big avenue next to a big river. Drive all over MARGINAL TIETÊ by following (always) the sign to MARGINAL PINHEIROS avenue. MARGINAL TIETE has many entrances, lines and exits, be careful to drive direct to MARGINAL PINHEIROS (aprox. 17Km). After reach MARGINAL PINHEIROS, you must drive 6 Km to reach USP campus.
REACHING P&S SCHOOL AT USP FROM HOWARD JOHNSON HOTEL
View R. do Matão, 1010 - Butantã in a larger map
MAP OF IME - USP
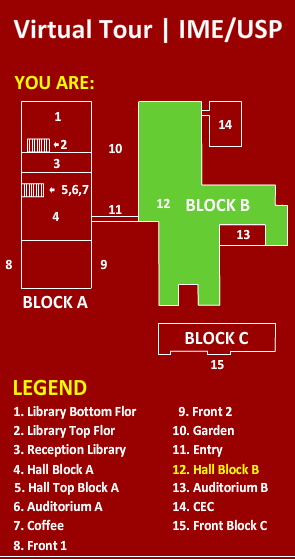
Click here for a tour in the location where the P&S School will happen:
Instituto de Matemática e Estatística da USP
Building and room: IME - Block B - Jacy Monteiro room
SCHOOL SCHEDULE
Day 1 (June 22 - Friday)
Course I (Part 1) 8:00 - 10:00
Course II (Part 1) 10:30 - 12:30
Lunch
Course I (Part 2) 13:00 - 15:30
Course II (Part 2) 16:00 - 18:00
Pizza in the city
Day 2 (June 23 - Saturday)
Course III (Part 1) 8:00 - 10:00
Course IV (Part 1) 10:30 - 12:30
Lunch
Course III (Part 2) 13:30 - 16:30
Course IV (Part 2) 17:00 - 19:00
SAMBA
Day 3 (June 24 - Sunday)
São Paulo city tour
Trip to Atibaia
COURSE ABSTRACT
I. Advanced Introduction to Planning: Models and Methods (Hector Geffner) [Slides]
Planning is the model-based approach to autonomous behavior where the agent behavior is derived automatically from a model. The main challenges in planning are computational as all models, whether featuring uncertainty and feedback or not, are intractable in the worst case. In this tutorial, we will look at the variety of models used in AI planning, and the techniques that have been developed for solving them. The goal is to provide a modern and coherent view of planning that is comprehensive but not shallow. The target audience of this tutorial is students and researchers interested in autonomous behavior and cognitive science. The topics we will cover are: (1) Introduction to AI Planning (2) Classical Planning as Heuristic Search (3) Beyond Classical Planning: Transformations - Soft goals, Incomplete Information, Plan Recognition (4) Planning with Uncertainty: MDPs and POMDPs (5) Open Problems and Challenges
II. Constraint-based Planning and Scheduling (Roman Barták) [Slides]
Constraint satisfaction emerged from AI research and nowadays it contributes in many areas such as planning, scheduling, and assignment problems etc. The tutorial explains major constraint satisfaction algorithms with emphasis put on using constraints in planning and scheduling. The tutorial is divided into two main parts. In the first part the constraint satisfaction technology is explained in general \u2013 the mainstream search and inference algorithms are presented. The second part is specialised to planning and scheduling problems. The constraint models of these problems will be described together with several inference and search techniques developed for these models.
III. Probabilistic Planning (Mausam and Andrey Kolobov) [Slides]
Planning under uncertainty is a central problem in designing intelligent autonomous agents. Markov Decision Processes (MDPs) act as a unifying framework for modeling such problems, however, the basic MDP algorithms suffer from the curse of dimensionality and hence, do not scale beyond small state spaces. The goal of this tutorial is to provide an overview of the solution algorithms starting from the fundamental Bellman Equations and Value Iteration right to the cutting-edge determinization-based approximations, basis-function approximations and the UCT algorithm. By the end of the tutorial, the audience will get a cohesive picture of the varieties of algorithms, their optimizations and theoretical properties.
IV. Recent Advances in Continuous Planning (Scott Sanner) [Slides]
This tutorial will outline the importance of continuous variables and actions in deterministic and stochastic planning and how one can cope with the complexity of planning for such problems in practice. The first part of the tutorial will focus on modeling real-world phenomena both abstractly (deterministic transition models, MDPs, POMDPs) and in terms of formal planning languages (PDDL, PPDDL, and RDDL). The second part of the tutorial will focus on solution methods, ranging from search in deterministic settings, through to approximation methods such as discretization and sampling. From this point, the tutorial will shift to an in-depth focus on very recent work that allows the exact solution of an expressive range of continuous planning problems via a technique referred to as Symbolic Dynamic Programming. The tutorial will conclude by briefly connecting continuous planning to related fields such as Control Theory and Scheduling.
PHOTO

ORGANIZING COMMITEE
- Leliane Nunes de Barros
- Fabio Gagliardi Cozman
- Flavio Soares Correia da Silva
- Karina Valdivia Delgado